ROBOT LAB
Robot Lab was a group project in my fourth year that the whole cohort (25 people) worked together to make an assembly line of a gearbox.
We were divided into different teams: robot programming teams to control the robot arms, PLC teams to handle the kitting tray's moving logic, and the mechanical team which focused on designing robot fixtures and other mechanical components for the assembly line.
Within the mechanical team, I took charge of designing two critical components: the automatic part feeder for storing and supplying parts to the robot arms and the kitting tray for transporting the parts.
Automatic Part Feeder
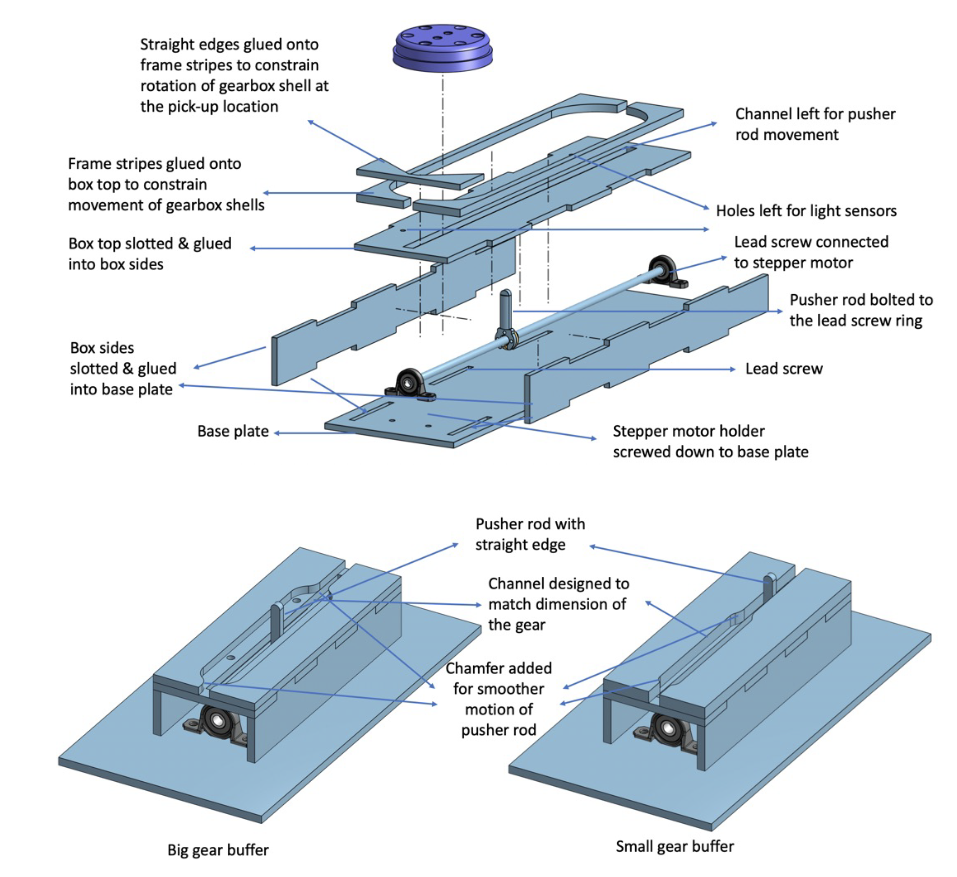
The primary goal was to enable the SCARA robot to consistently pick up and deposit parts from a fixed location.
This self-contained unit operates independently, eliminating the need for integration with the PLC or the robot. My responsibilities encompassed mechanical design and making of the entire buffer system.
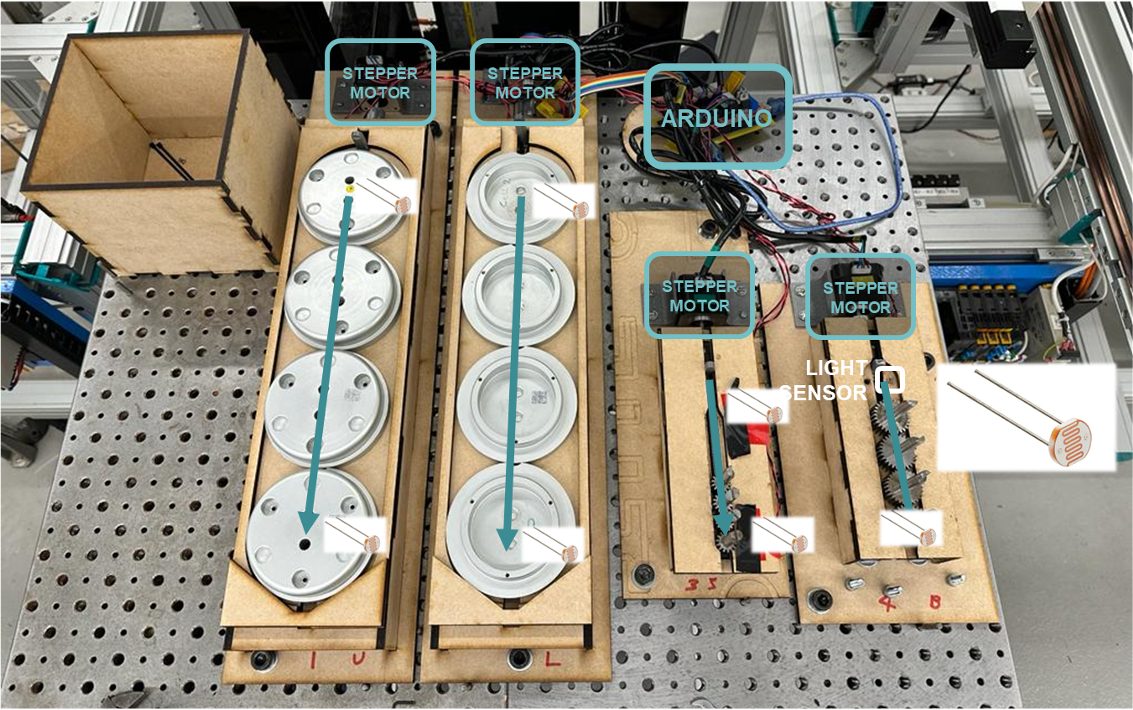
The part feeder moves the part forward after the robot takes it
A testing of the part feeder before implement it to the robot

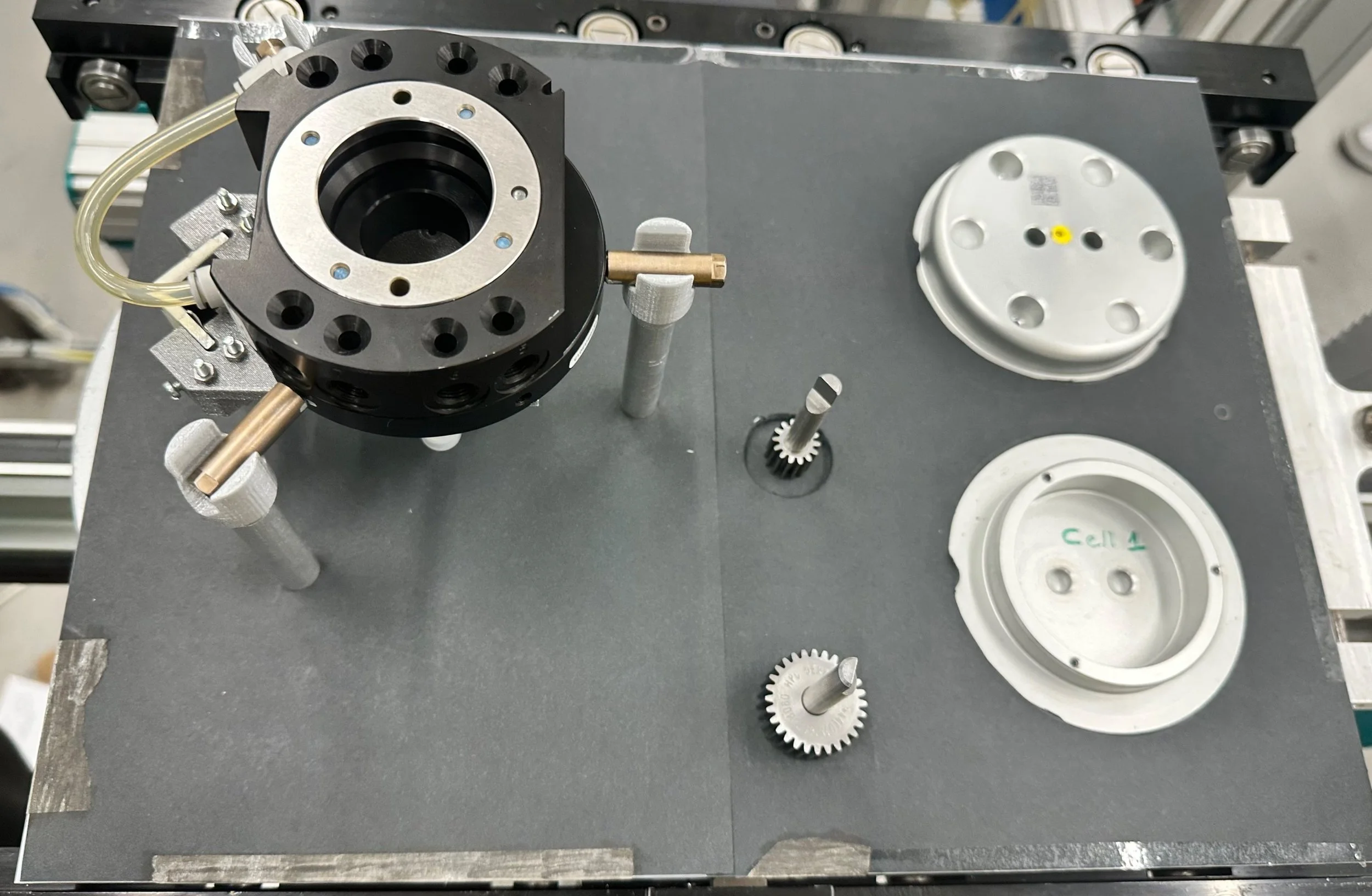
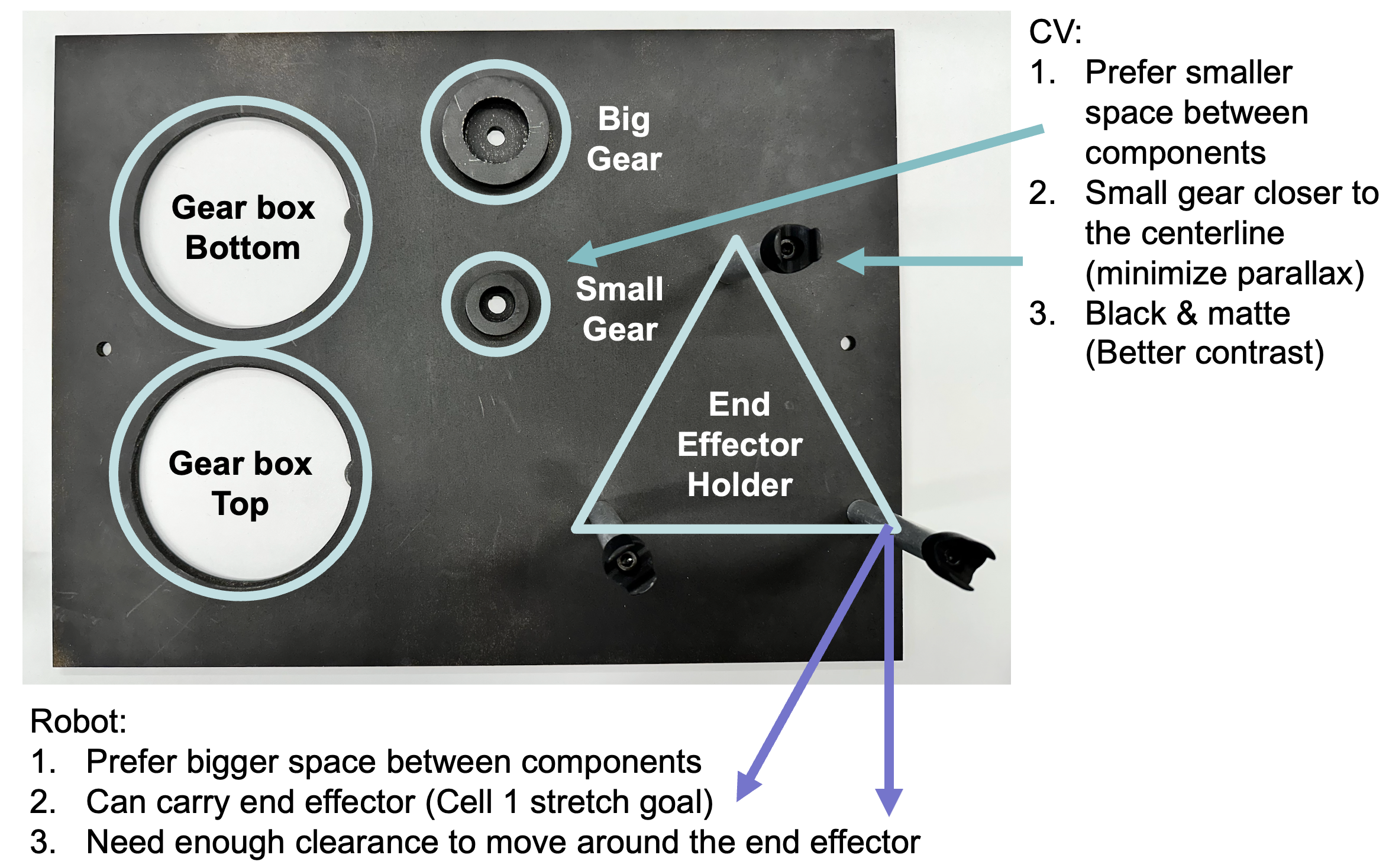
Kitting Tray
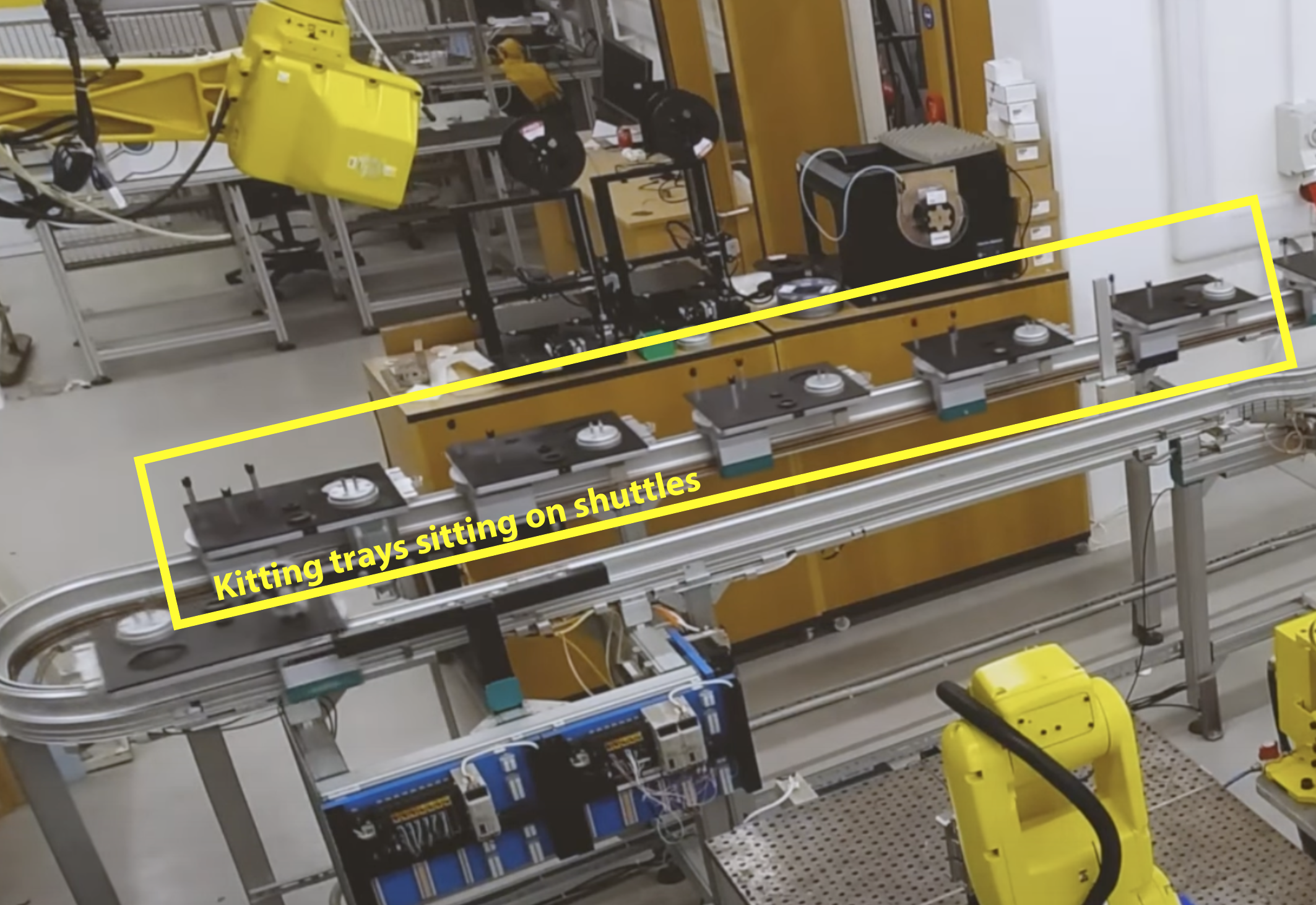
Kitting trays sit on the top of the shuttles that move around the assembly line and carry all the components needed by the robots. The design needs extremely good precision for robot arms to fit or pick up parts precisely every time.